






















-



 4D车道线
4D车道线 -


 语义分割
语义分割 -


 点云连续帧
点云连续帧 -


 离散帧
离散帧 -


 3D立体框
3D立体框 -


 2D框
2D框
-
 4D车道线4D车道线动态标注任务
4D车道线4D车道线动态标注任务任务名称
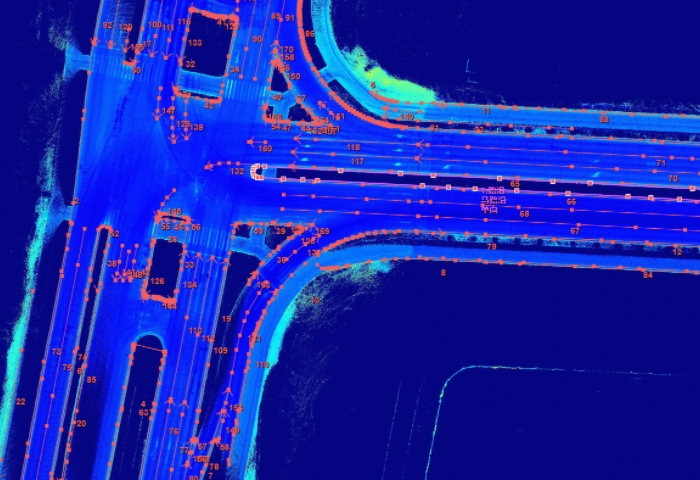
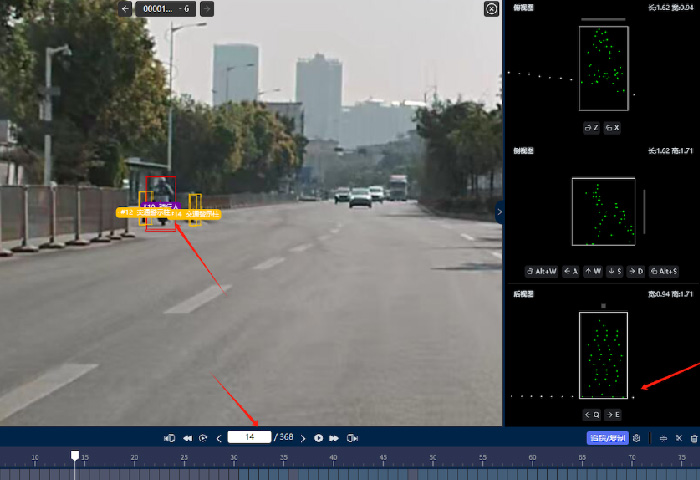
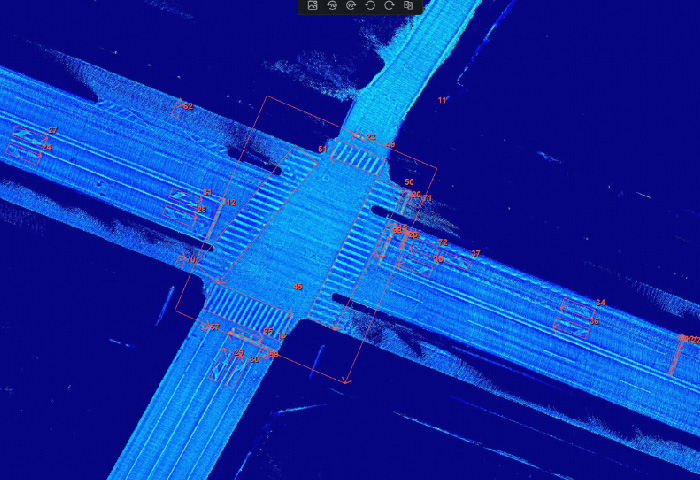
4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID) -
 语义分割
语义分割任务名称
4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID) -
 点云连续帧
点云连续帧任务名称
4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID) -
 离散帧
离散帧任务名称
4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID) -
 3D立体框
3D立体框任务名称
4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID) -
 2D框
2D框任务名称
4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
任务名称
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)4D时空连续帧车道线结构化标注(含动态轨迹)
任务需求在连续帧图像/点云数据中,标注车道线、交通标线等道路结构化要素
标注内容3D空间坐标序列(XYZ) 及时间戳(构建4D时空轨迹)
车道线类型(实线/虚线/双黄线/导流线)、车道属性(同向/对向/应急车道)、曲率半径
跨帧车道线关联(同一车道线在连续帧中保持唯一Track ID)
-


 感知标注
感知标注 -


 交互标注
交互标注 -


 任务级标注
任务级标注
-
 感知标注
感知标注任务名称
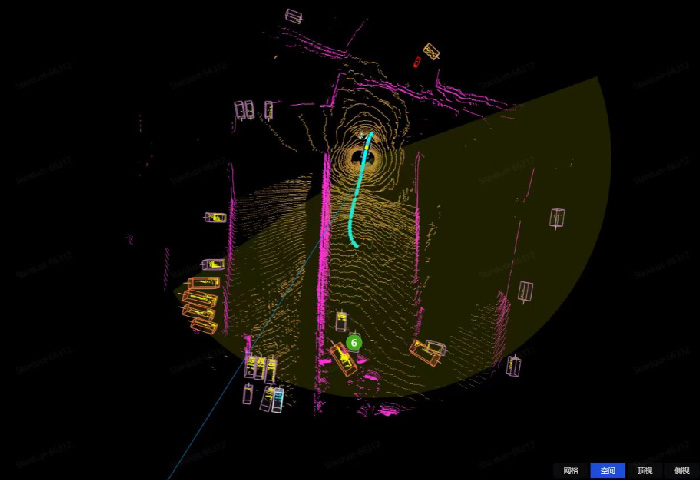
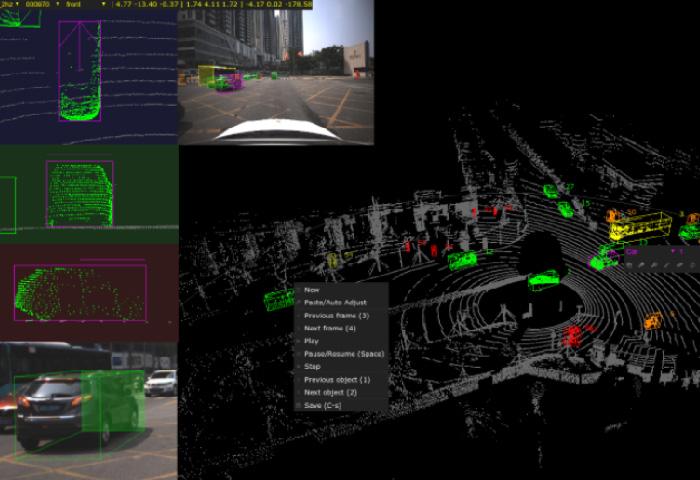
多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
任务名称
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分)多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
任务名称
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分)多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分) -
 交互标注
交互标注任务名称
多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
任务名称
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分)多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
任务名称
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分)多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分) -
 任务级标注
任务级标注任务名称
多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
任务名称
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分)多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
任务名称
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分)多传感器融合感知数据联合标注(2D/3D 目标与语义)
任务需求★ 对图像、3D点云、深度图等多模态数据进行联合标注,建立统-空间坐标系(如自动驾驶/机器人坐标系)
★ 标注内容
目标检测:2D边界框(像素坐标) 、3D包围盒(XYZ坐标、长宽高、航向角,精度+5cm) 及跨模态对齐(如3D框在图像中的投影匹配度≥95%)
语义与实例:像素/点云级语义标签(道路/障碍物/可交互物体等)、 动态目标Instance ID (单帧内唯一, 支持同类物体区分)
-

 文本标注
文本标注 -

 代码标注
代码标注 -

 语音转写
语音转写 -


 结构化数据标注
结构化数据标注
-
 文本标注
文本标注任务名称
多场景文本语义与任务导向标注(NLP 模型训练)
任务需求★ 对文本进行基础语义标注(分词、词性、命名实体识别)
★ 标注复杂语义关系(句法结构、共指消解、逻辑关系)
★ 构建任务导向数据对(如“问题-答案”“指令-响应”)
★ 支持多语言、多领域(通用/垂直领域)文本标注 -
 代码标注
代码标注任务名称
多场景文本语义与任务导向标注(NLP 模型训练)
任务需求★ 对文本进行基础语义标注(分词、词性、命名实体识别)
★ 标注复杂语义关系(句法结构、共指消解、逻辑关系)
★ 构建任务导向数据对(如“问题-答案”“指令-响应”)
★ 支持多语言、多领域(通用/垂直领域)文本标注 -
 语音转写
语音转写任务名称
多场景文本语义与任务导向标注(NLP 模型训练)
任务需求★ 对文本进行基础语义标注(分词、词性、命名实体识别)
★ 标注复杂语义关系(句法结构、共指消解、逻辑关系)
★ 构建任务导向数据对(如“问题-答案”“指令-响应”)
★ 支持多语言、多领域(通用/垂直领域)文本标注 -
 结构化数据标注
结构化数据标注任务名称
多场景文本语义与任务导向标注(NLP 模型训练)
任务需求★ 对文本进行基础语义标注(分词、词性、命名实体识别)
★ 标注复杂语义关系(句法结构、共指消解、逻辑关系)
★ 构建任务导向数据对(如“问题-答案”“指令-响应”)
★ 支持多语言、多领域(通用/垂直领域)文本标注
-

 医疗图像
医疗图像 -

 医疗文本
医疗文本
-
 医疗图像
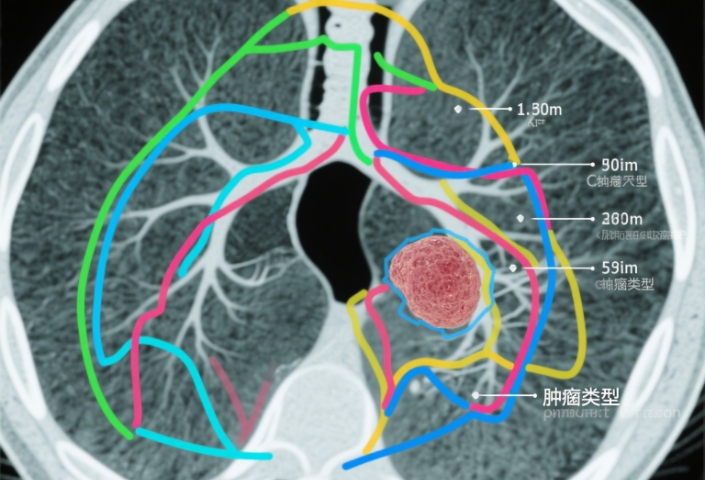
医疗图像标注内容
★ 解剖结构标注:器官边界(如肺、肝脏、肾脏)、骨骼结构(椎体、关节)的 2D/3D 轮廓(语义分割)
技术要求
★ 病变检测标注:病灶区域(肿瘤、结节、出血点)的 2D 边界框 / 3D 包围盒标注类型(良性 / 恶性)、大小(直径 /mm³)、位置(如右肺上叶)
★ 密度 / 强度标注:标注组织密度值(如 CT 值 Hu 单位)、异常区域灰度特征(如钙化灶、低密度影)★ 精度达亚毫米级(如肺结节标注误差≤2mm),支持多模态融合标注(如 CT 与 PET 图像对齐)
标注内容★ 解剖结构标注:器官边界(如肺、肝脏、肾脏)、骨骼结构(椎体、关节)的 2D/3D 轮廓(语义分割)
技术要求
★ 病变检测标注:病灶区域(肿瘤、结节、出血点)的 2D 边界框 / 3D 包围盒标注类型(良性 / 恶性)、大小(直径 /mm³)、位置(如右肺上叶)
★ 密度 / 强度标注:标注组织密度值(如 CT 值 Hu 单位)、异常区域灰度特征(如钙化灶、低密度影)★ 精度达亚毫米级(如肺结节标注误差≤2mm),支持多模态融合标注(如 CT 与 PET 图像对齐)
-
 医疗文本
医疗文本标注内容
★ 解剖结构标注:器官边界(如肺、肝脏、肾脏)、骨骼结构(椎体、关节)的 2D/3D 轮廓(语义分割)
技术要求
★ 病变检测标注:病灶区域(肿瘤、结节、出血点)的 2D 边界框 / 3D 包围盒标注类型(良性 / 恶性)、大小(直径 /mm³)、位置(如右肺上叶)
★ 密度 / 强度标注:标注组织密度值(如 CT 值 Hu 单位)、异常区域灰度特征(如钙化灶、低密度影)★ 精度达亚毫米级(如肺结节标注误差≤2mm),支持多模态融合标注(如 CT 与 PET 图像对齐)
标注内容★ 解剖结构标注:器官边界(如肺、肝脏、肾脏)、骨骼结构(椎体、关节)的 2D/3D 轮廓(语义分割)
技术要求
★ 病变检测标注:病灶区域(肿瘤、结节、出血点)的 2D 边界框 / 3D 包围盒标注类型(良性 / 恶性)、大小(直径 /mm³)、位置(如右肺上叶)
★ 密度 / 强度标注:标注组织密度值(如 CT 值 Hu 单位)、异常区域灰度特征(如钙化灶、低密度影)★ 精度达亚毫米级(如肺结节标注误差≤2mm),支持多模态融合标注(如 CT 与 PET 图像对齐)
-
智慧矿车
-
 智慧矿车
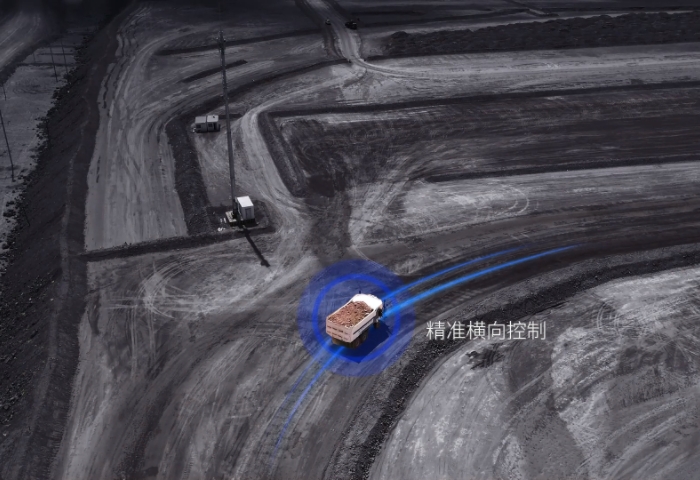
智慧矿车★ 传统矿场依赖人工经验决策(如矿体判断、设备检修),数据标注通过量化分析地质、设备、环境等数据,为 AI 模型提供训练素材,推动决策逻辑从 “主观判断” 转向 “数据智能”。
★ 标注矿用卡车 / 机器人的摄像头、激光雷达数据,训练 3D 目标检测模型(如识别障碍物、道路边界),实现矿区无人运输。
-

 作业/试卷标注
作业/试卷标注 -

 教育资源语义
教育资源语义
-
 作业/试卷标注
作业/试卷标注★ 客观题:标注正确答案、选项解析(如 “错误选项为何不正确”)
★ 主观题:标注得分点(如作文的 “论点明确”“论据充分”)、错误类型(计算错误 / 概念混淆 / 逻辑漏洞)
★ 特殊需求:支持手写体识别标注(如数学公式、化学方程式的笔迹解析) -
 教育资源语义
教育资源语义★ 客观题:标注正确答案、选项解析(如 “错误选项为何不正确”)
★ 主观题:标注得分点(如作文的 “论点明确”“论据充分”)、错误类型(计算错误 / 概念混淆 / 逻辑漏洞)
★ 特殊需求:支持手写体识别标注(如数学公式、化学方程式的笔迹解析)
-
智慧金融
-
 智慧金融
智慧金融智能客服标注
★ 标注客服对话文本的意图(咨询、投诉、办理业务)、情感强度(愤怒、满意)、关键信息(账户号、产品名称),实现 7×24 小时自动化响应(常见问题解决率提升 60%)。
个性化推荐标注
★ 特殊需求:支持金融术语解析(如 “信用证”“掉期交易” 的标准化解释)★ 标注客户持仓数据(股票、基金、保险产品)、风险偏好(保守型、激进型)交易习惯(高频交易 / 长期定投),推送定制化产品(如为高净值客户推荐私募产品)。
-

 工业质检标注
工业质检标注 -

 汽车零部件
汽车零部件
-
 工业质检标注
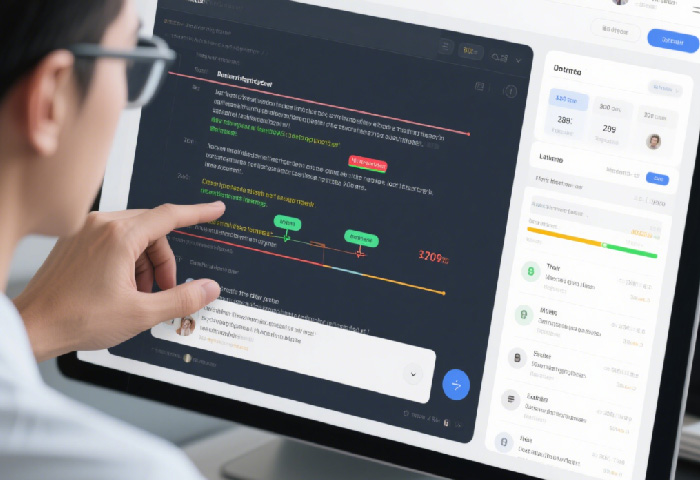
工业质检标注★ 场景:现代化汽车工厂的质检车间,工程师使用 CVAT 标注平台对发动机缸体图像进行缺陷标记。
★ 细节:标注内容:屏幕显示高分辨率图像,工程师用多边形工具圈选活塞环划痕,右侧悬浮窗显示 “划痕长度 2.3mm→缺陷等级 B”。 -
 汽车零部件
汽车零部件★ 场景:现代化汽车工厂的质检车间,工程师使用 CVAT 标注平台对发动机缸体图像进行缺陷标记。
★ 细节:标注内容:屏幕显示高分辨率图像,工程师用多边形工具圈选活塞环划痕,右侧悬浮窗显示 “划痕长度 2.3mm→缺陷等级 B”。






















